Platform
Data Capture
Capture synchronized multi-modal data from your entire fleet, manage it in the cloud, and prepare it for training with the infrastructure to do it reliably at scale.
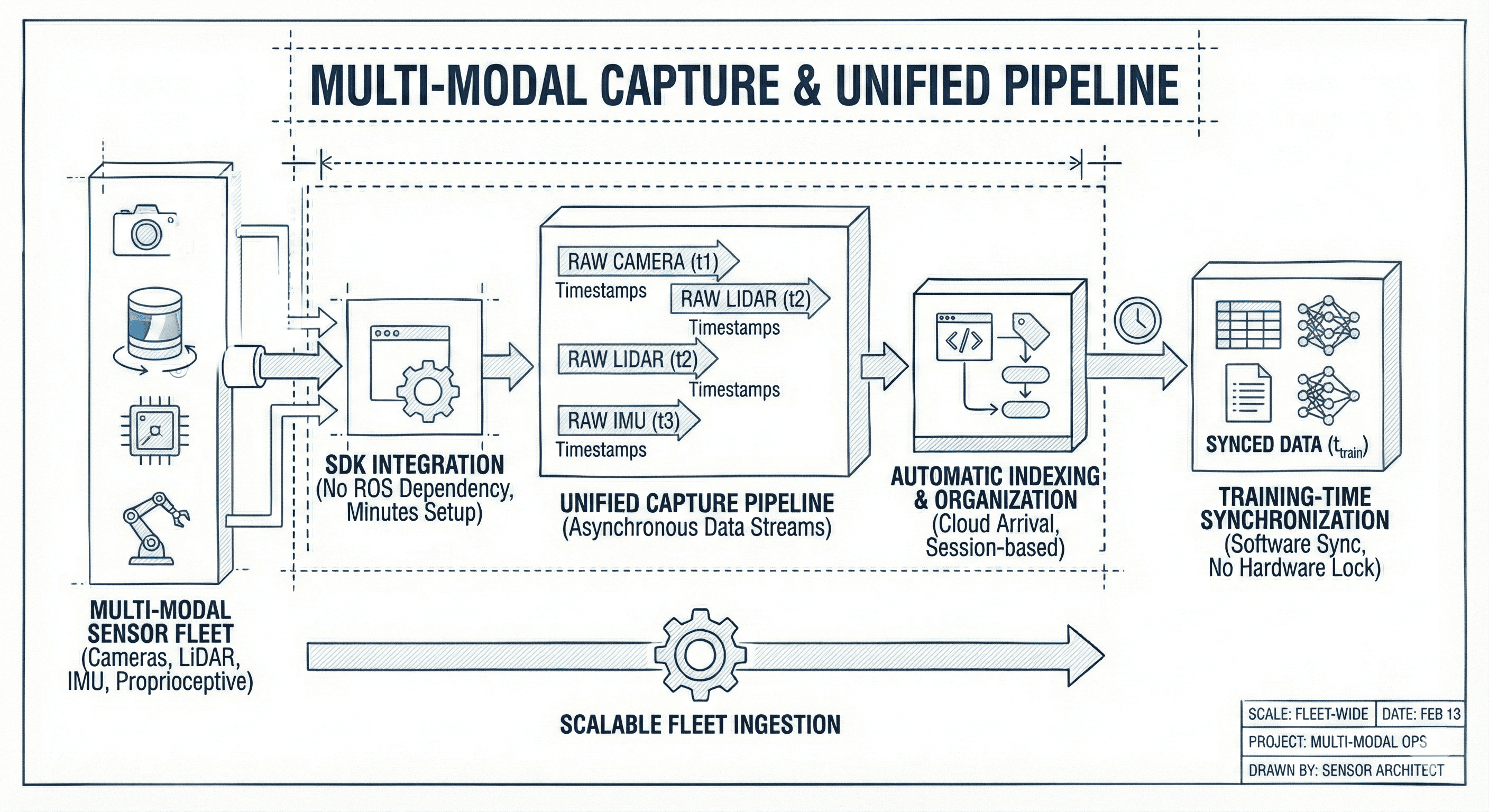
Multi-modal capture
Capture data from cameras, LiDAR, IMU, and proprioceptive sensors across your entire fleet in a single unified pipeline. Time synchronization is applied at training time, not collection time, removing the need for complex hardware sync at the edge. Every session is automatically indexed and organized as it arrives. Integrate through our SDK in minutes without ROS dependency.
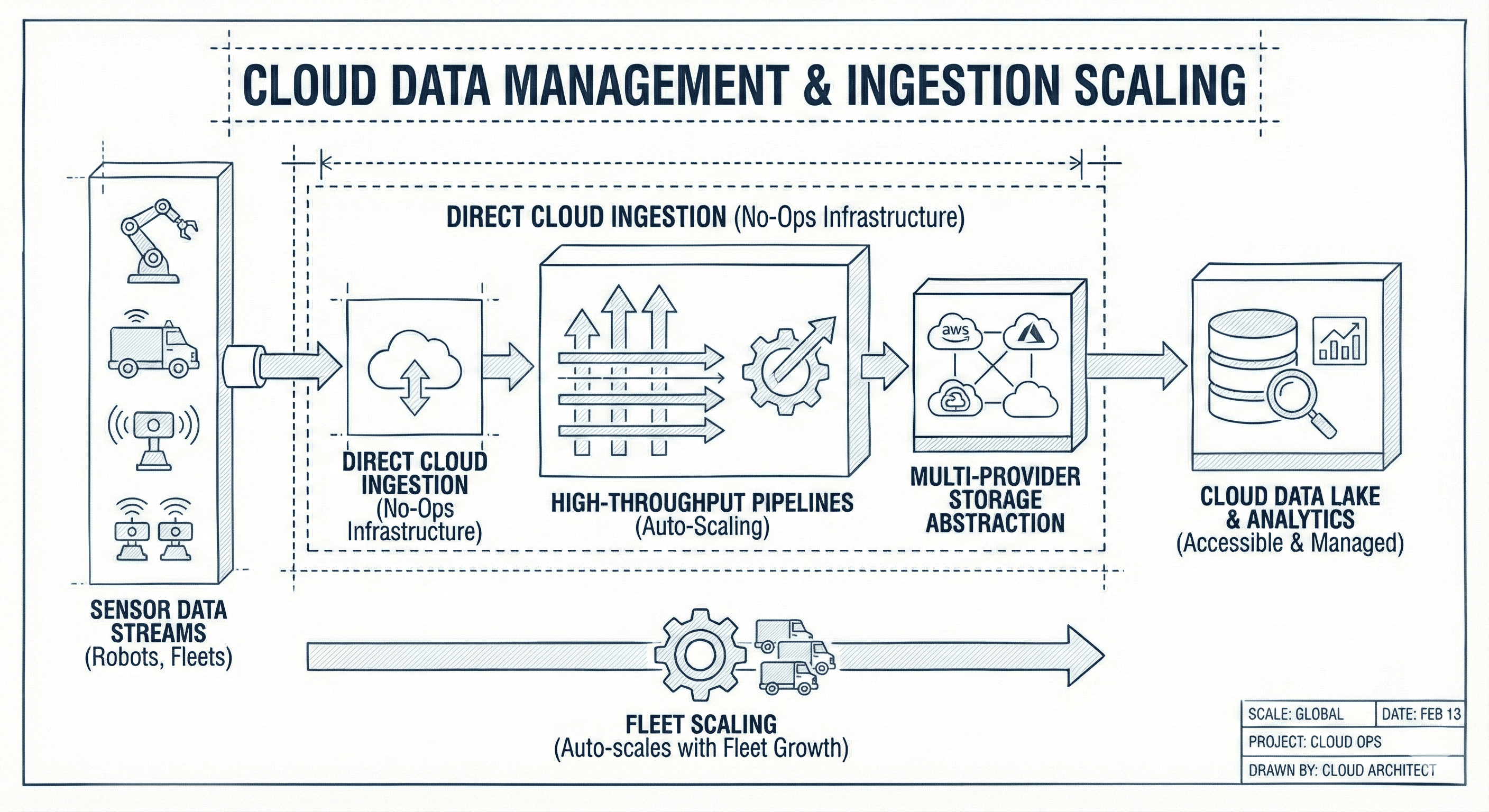
Cloud data management
Stream sensor data directly to the cloud without managing storage infrastructure across providers. Purpose-built for high-throughput robotics workloads, with ingestion pipelines that scale automatically with your fleet.
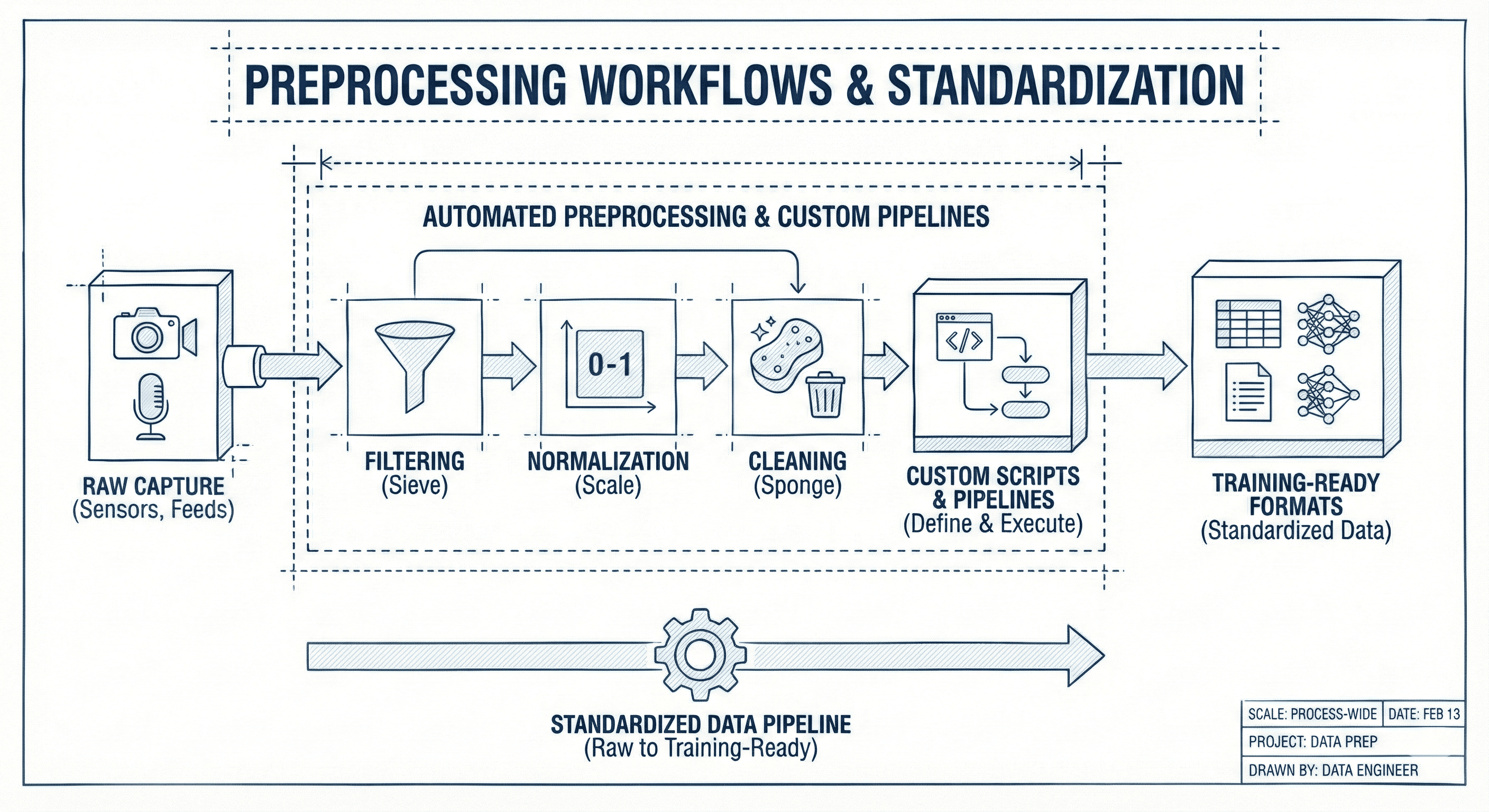
Preprocessing workflows
Automate common preprocessing tasks such as filtering, normalization, and cleaning or define custom scripts and pipelines for complete dataset preparation. Standardize your data pipeline from raw capture to training-ready formats.
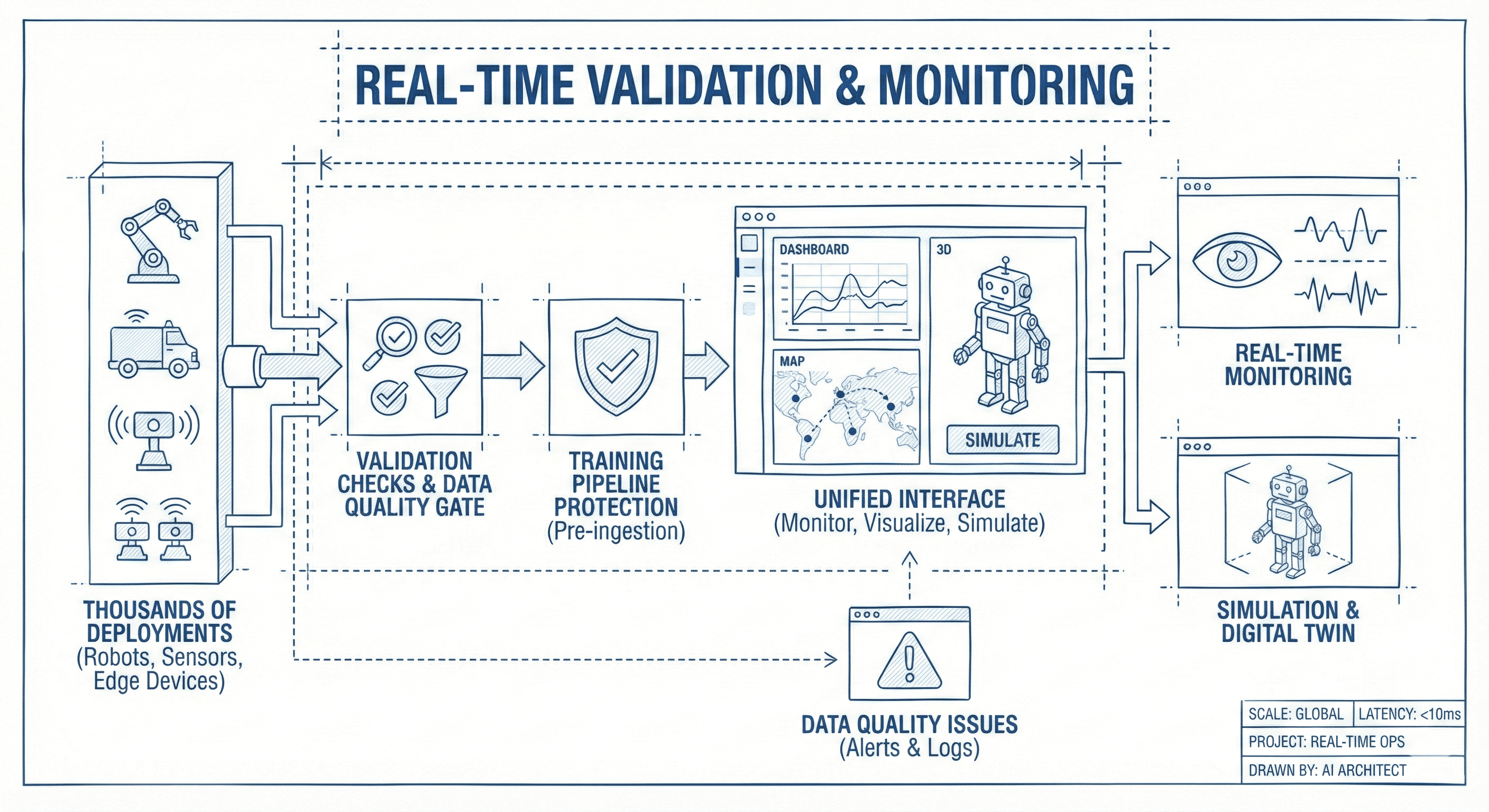
Real-time validation
Run validation checks across thousands of deployments to catch data quality issues before they enter your training pipeline. Monitor, visualize, and simulate deployed robots in real time from a single interface.
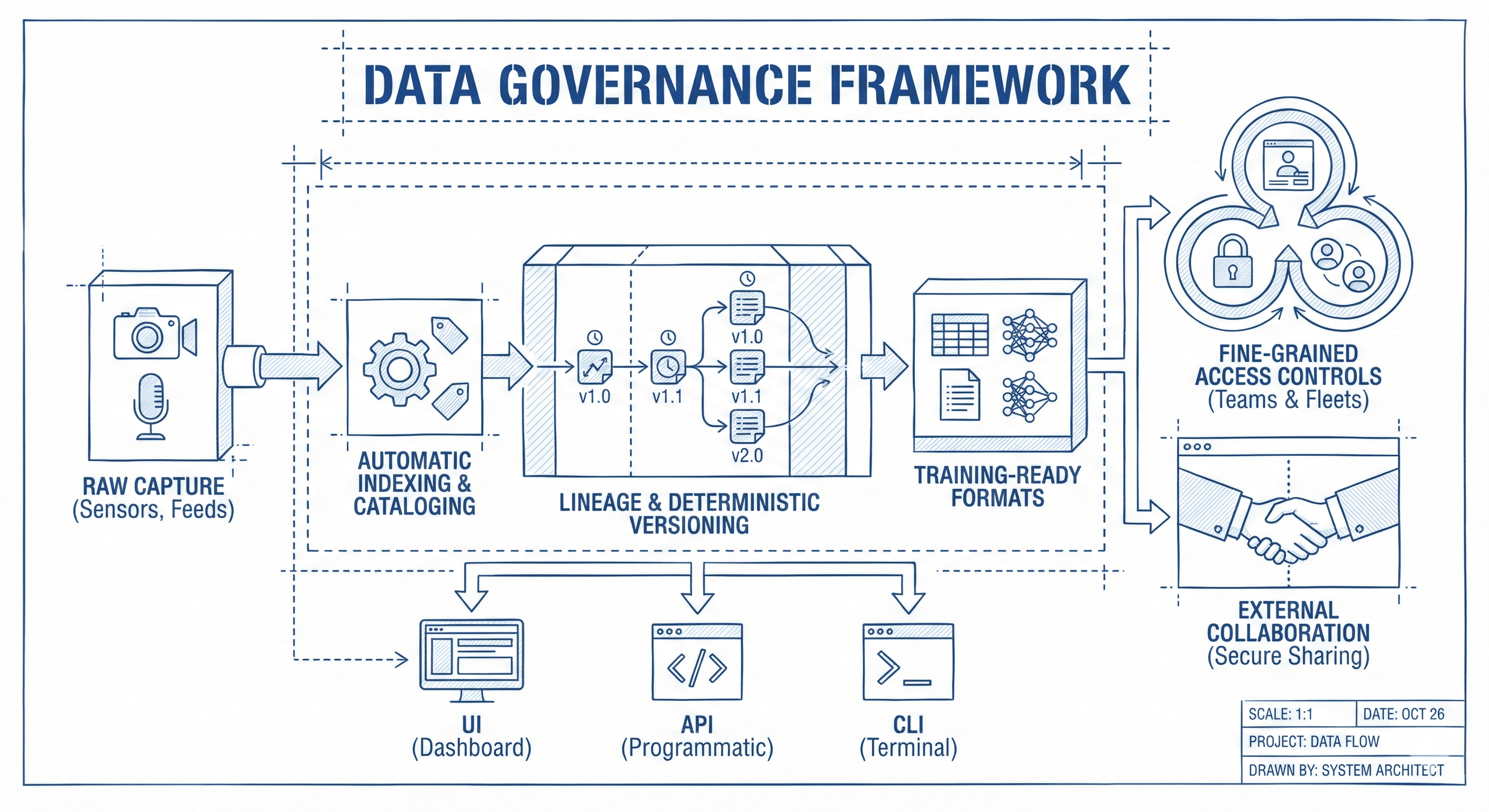
Data governance
Track every dataset from raw capture through to training-ready formats with complete lineage, automatic indexing, and deterministic versioning. Fine-grained access controls across teams and fleets, with the ability to share datasets with external collaborators. Accessible via UI, API, and CLI.